
| 1面 |  |
ついて来る知能ロボ 乗り物にも変形
fuRoが「CanguRo」公開
未来ロボット技術研究センター(fuRo)は7月4日、ロボットから乗り物へと自動変形する次世代モビリティー「CanguRo」(カングーロ)を報道関係者に公開した。人工知能(AI)全盛時代の人と乗り物との“新しい関係”を先導しようという意欲作。古田貴之所長は「乗り物の新たな価値を創り出して社会変革を起こす」と胸を張った。
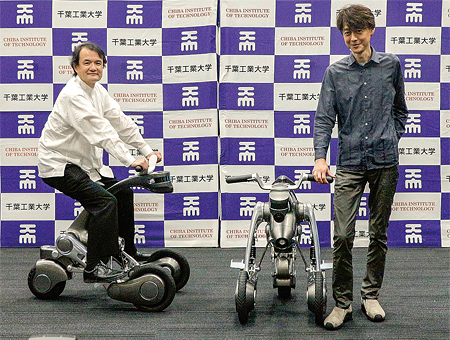 |
| 説明する古田所長(右)とデザイナーの山中さん |
AI時代の相棒を創る
 |
CanguRoはイタリア語で「カンガルー」を意味している。乗り物とロボットとの完全な融合を目指す「RidRoid」(ライドロイド)シリーズと位置づけられている。
CanguRoの開発は人と馬とのパートナー関係を模して進められた。人は馬の主人であり、お互いによき相棒でもある。また、その背に跨れば便利な乗り物となり、爽快な人馬一体感をもたらす。このような人と馬との関係を、高度なAIとロボット技術を駆使して再現したのがCanguRoだ。
ロイドモード(ロボット)時のCanguRoは映画に登場する相棒ロボットのように、時には主人の後をついてきて、買い物の荷物運びなどを手伝い、離れた場所にいても、スマートフォンなどで呼び出せば、fuRo独自のSLAM技術・scanSLAM=下の注参照=によって、指定の場所まで完全自動操縦で迎えにきてくれる。
主人が移動したい時はライドモードに自動で電動変形し、主人の身体の一部となって移動をサポートする。とりわけ注目なのが旋回機能。スキーでスラロームを滑るように、CanguRo自体がボディーを変形させ、姿勢を傾けながら旋回する。
また、CanguRo本体にはボディーソニックスピーカーが内蔵されている。これによって搭乗者は速度に応じたハートビートの鼓動を、サドルの振動を通じて身体全体で感じ取ることができる。
さらにハンドルの力覚フィードバック機能によって、旋回時の回転半径もリアルタイムで“体感”できる。これらの体感機能は“人機一体感”を作り出すために実装された技術だ。
移動中、万が一事故を起こしそうになっても、スマートストップ機能で自動ブレーキが働き、未然に衝突を回避する。
CanguRoの開発は人と馬とのパートナー関係を模して進められた。人は馬の主人であり、お互いによき相棒でもある。また、その背に跨れば便利な乗り物となり、爽快な人馬一体感をもたらす。このような人と馬との関係を、高度なAIとロボット技術を駆使して再現したのがCanguRoだ。
ロイドモード(ロボット)時のCanguRoは映画に登場する相棒ロボットのように、時には主人の後をついてきて、買い物の荷物運びなどを手伝い、離れた場所にいても、スマートフォンなどで呼び出せば、fuRo独自のSLAM技術・scanSLAM=下の注参照=によって、指定の場所まで完全自動操縦で迎えにきてくれる。
主人が移動したい時はライドモードに自動で電動変形し、主人の身体の一部となって移動をサポートする。とりわけ注目なのが旋回機能。スキーでスラロームを滑るように、CanguRo自体がボディーを変形させ、姿勢を傾けながら旋回する。
また、CanguRo本体にはボディーソニックスピーカーが内蔵されている。これによって搭乗者は速度に応じたハートビートの鼓動を、サドルの振動を通じて身体全体で感じ取ることができる。
さらにハンドルの力覚フィードバック機能によって、旋回時の回転半径もリアルタイムで“体感”できる。これらの体感機能は“人機一体感”を作り出すために実装された技術だ。
移動中、万が一事故を起こしそうになっても、スマートストップ機能で自動ブレーキが働き、未然に衝突を回避する。
人・機の関係を先導
 |
| 記者たちに囲まれるCanguRo |
「AI、ロボット技術がこれだけ進化した中にあって、乗り物は本当に進化してきたのだろうか。人と乗り物との関係は変わってきたのだろうか」
7月4日、スカイツリータウンキャンパスで開かれた報道陣への発表会。会場をぎっしり埋めた53社74人の記者やカメラマンがCanguRoに熱い視線を向ける中で、古田所長はこう語りかけた。
「自動車が誕生して100年、依然として乗り物の目的・用途は、A地点からB地点への移動手段であることから変わっていない。私たちの目的は、このAI、ロボティクス全盛時代に“イノベーティブな乗り物を創る”ことでした」
その答えが「パーソナルモビリティーを超えた真の人機一体・AI時代のパートナー」だった。
この目標に向かって古田所長以下のfuRoのスタッフと二人三脚でゼロから挑戦したのが、プロダクトデザイナーの山中俊治氏だ。山中氏はこれまでも古田所長と手を組んで、ヒューマノイドロボットの「morph3」や、56個のモーターを駆使して、ビークル、アニマル、インセクトの3形態に変化する移動ロボット「HallucⅡ」などを創り出してきた。
発表会に同席した山中氏は「CanguRoのデザインで気をつけたのは、構造自体が美しくて分かりやすく、人との関わりがよく分かる表現になっていること。結果的にはフレームそのものが美しく、合理的な構造で、あらゆるディテールに美的感覚があふれたものになった」と語った。
さらに古田所長はCanguRoに使われているインホイール駆動ユニットやScanSLAMなどのコア技術が、自動操縦などさまざまな分野で今後、幅広く応用されていく可能性を示唆した。
7月4日、スカイツリータウンキャンパスで開かれた報道陣への発表会。会場をぎっしり埋めた53社74人の記者やカメラマンがCanguRoに熱い視線を向ける中で、古田所長はこう語りかけた。
「自動車が誕生して100年、依然として乗り物の目的・用途は、A地点からB地点への移動手段であることから変わっていない。私たちの目的は、このAI、ロボティクス全盛時代に“イノベーティブな乗り物を創る”ことでした」
その答えが「パーソナルモビリティーを超えた真の人機一体・AI時代のパートナー」だった。
この目標に向かって古田所長以下のfuRoのスタッフと二人三脚でゼロから挑戦したのが、プロダクトデザイナーの山中俊治氏だ。山中氏はこれまでも古田所長と手を組んで、ヒューマノイドロボットの「morph3」や、56個のモーターを駆使して、ビークル、アニマル、インセクトの3形態に変化する移動ロボット「HallucⅡ」などを創り出してきた。
発表会に同席した山中氏は「CanguRoのデザインで気をつけたのは、構造自体が美しくて分かりやすく、人との関わりがよく分かる表現になっていること。結果的にはフレームそのものが美しく、合理的な構造で、あらゆるディテールに美的感覚があふれたものになった」と語った。
さらに古田所長はCanguRoに使われているインホイール駆動ユニットやScanSLAMなどのコア技術が、自動操縦などさまざまな分野で今後、幅広く応用されていく可能性を示唆した。
国際デビューへ
CanguRoは8月、国際デビューを飾る。まず8月15日から米国ロサンゼルスで開催される外務省の新プロジェクト展示企画「ジャパンハウス」でデモンストレーションを行う。
また同じ8月15日、アカデミー賞の授賞会場「Hollywood&Highland」で行われる山中俊治企画展『Prototyping in Tokyo〜先導するデザインの制作絵巻〜』のメディア&VIPプレビューでもデモを行う予定。
また同じ8月15日、アカデミー賞の授賞会場「Hollywood&Highland」で行われる山中俊治企画展『Prototyping in Tokyo〜先導するデザインの制作絵巻〜』のメディア&VIPプレビューでもデモを行う予定。
■SLAM技術
レーザーやカメラなどのセンサーの情報を解析して、自己の位置を推定しつつ周囲の地図を構築する、自動操縦やロボットにおける“人間の目”の役割に相当するコア技術。
■CanguRo開発スタッフ(敬称略)
大和秀彰(技術統括/機構設計、制御系)▽荻原一輝(機構設計、制御系)▽入江清(知能系ソフトウエア)▽小太刀崇(制御系ソフトウエア)▽友納正裕(SLAM技術、ナビゲーション技術)▽古田貴之(コンセプトメーク、開発リーダー)▽山中俊治(コンセプトメーク、デザイン)
■CanguRoの仕様(抜粋)
- 全長
- 550mm(ロイドモード)/750mm(ライドモード)
- 全幅
- 400mm
- 重量
- 64kg
- 速度
- 10km/h
- 電池
- Li‐fe、52.8V
前輪駆動/後輪操舵(開発したインホイール駆動ユニットを搭載)
チュラロンコン大の工学部とも交流協定
 |
小宮一仁学長=写真右=は6月19日、タイ・バンコクのチュラロンコン大学を訪問し、工学部のSupot Teachavorasinskun (スポット・テーチャウォーラシンサクン)学部長=同左=と交流協定を締結した。
チュラロンコン大はタイで最古の1917年に設立された最も権威ある国立大。18学部と種々の研究機関がある。薬学部とはすでに2016年に協定を締結。工学部とも協定したことで、さらに幅広い学術交流が期待される。
チュラロンコン大はタイで最古の1917年に設立された最も権威ある国立大。18学部と種々の研究機関がある。薬学部とはすでに2016年に協定を締結。工学部とも協定したことで、さらに幅広い学術交流が期待される。
| 2面→ |
千葉工業大学/〒275-0016 千葉県習志野市津田沼2-17-1
Copyright © Chiba Institute of Technology. All rights reserved.
Copyright © Chiba Institute of Technology. All rights reserved.