2006.07.15
ロボカップ2006世界大会(ドイツ・ブレーメン) ヒューマノイドリーグ・小型ロボットリーグでも好成績
ハイビスカスの記者発表行う
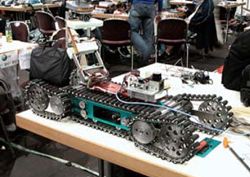
ドイツでのロボカップ2006世界大会出場に先立ち、6月5日(月)芝園校舎11号館で、と吉田智章研究員が開発した、実用化を目的にした新型レスキューロボット「ハイビスカス(Hibiscus)」の記者発表とデモンストレーションが行われた。 このロボットは、家屋倒壊したガレキなどの災害現場を安定走行できる新型ロボット。機体全体をベルト状の軌道(センタークローラー)で覆い、障害物に乗り上げても空転することなく移動が可能になった。 大きさは縦65センチで、展開時は98センチ、横幅37センチ、高さ18センチ。バッテリーを含む重量は22.5キロ。進行方向側の軌道の前部の直径を大きくして、ガレキなどに埋まらずに進める。乗り越えられる段差踏破能力は40センチ。カメラや赤外線熱感知センサー、サーモグラフィを搭載、災害現場で救助者の発見を容易にしている。 この日の「ハイビスカス」のデモンストレーションでは、昨年、一昨年とロボカップ世界大会で2連覇したレスキューロボットとの比較走行も行われた。 記者発表の中で、は「1年後の実用化を目指しています。多様な災害現場で活躍できるロボットにしたい」と話している。
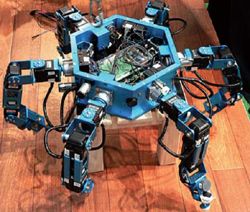
腕脚統合型ロボット『ASTERISK』開発の論文